Optimized Structural Design Recommender System – A two-step solution for AI-based ship design optimization
Introduction
The discovery and design of new structural elements design with specific properties are important for advancing technologies in the maritime industry. The basic design stage is a relatively fast process but an essential part of the ship’s lifecycle. It is not straightforward to measure the downstream impact of the quality of basic design. Errors in the detailed engineering stage, costly changes in production, lack of efficiency, predictability, and profitability in operations are all aspects that are not easy to consider when an experienced naval architect defines the configuration of a new ship. These aspects have an immediate impact on the ship cost, performance, weight, stability, safety, and manufacturability. (Florean, Alonso de los Rios, Pietro, & Seppälä, 2022)
Limitations of traditional and optimization-based methods
Traditional approaches to design discovery are time-consuming and expensive, limiting the pace of innovation. Analysis methods, such as CFD calculations, based on optimization algorithms, and the recent advancements in universal data exchange standards like OCX, have significantly accelerated this process. However, even these methods can be constrained by the complexity of the data, the number of stakeholders, and the processes involved.
Moreover, traditional approaches draw a clear line between design and engineering, where early design models focus on the vessel’s fundamental characteristics – naval architectural and functional aspects – while detailed design and production design deal with the layout intricacies and the generation of production and construction data. (Koelman, Veelo, Seppälä, & Filius, 2024) This separation often results in missing design considerations and leads to potential errors that could have been prevented in a more related system.
Emergence of machine learning in structural discovery
In recent years, machine learning approaches have emerged as promising tools for recommender systems of new structures, with the most notable successes in social networks, cybersecurity, molecular design, and drug discovery. These methods offer the potential to dramatically reduce the costs associated with design discovery and optimization while retaining valuable knowledge from past designs. Among them, Graph Neural Networks (GNNs) have shown exceptional promise due to their ability to naturally represent structures and complex interactions between elements.
This paper proposes a solution by 1) framing ship design as an optimization problem using a computer science approach, 2) utilizing existing standards and optimization methods, and 3) applying modern deep learning technologies to understand vessel profitability.
This paper presents a practical approach for incorporating artificial intelligence into ship design. Despite extensive discussions on the subject, there is a lack of specific methodologies. Our proposal focuses on fundamental elements of the ship design process, particularly data model representation, and recommends a robust strategy for data representation and storage that is favorable to AI integration.
State of the art
Artificial Intelligence
Artificial Intelligence is a branch of computer science that focuses on the study of intelligent agents that receive percepts from the environment and perform actions in response.
(Russel & Norvig, 2022) define intelligent agents as agents that implement a function that maps percept sequences to actions. These functions can be represented in various forms, ranging from reactive agents, real-time planners, to decision-theoretic systems and deep learning systems. Furthermore, learning is viewed both as a construction method for competent systems and as a mechanism for extending the reach of the designer into unknown environments. The goal of AI is to try to maximize expected utility, where the specific utility information, the objective, is supplied by the human designers of the system. While in the past the objective of an agent was fixed and known by the AI system, in modern approaches this is not the case; instead, the system may be uncertain about the true objectives of the humans on whose behalf it operates. It must learn to maximize the utility function appropriately, even while uncertain about the objective.
Defining intelligence across disciplines
The history of AI is relatively young, and fundamentally, it focuses on the definition of intelligence. Because intelligence itself does not have one interpretation and is explored in several fields, from philosophy and neuroscience to economics, the evolution of artificial intelligence is tightly coupled with these different perspectives.
An AI agent is said to be learning if it improves its performance after making observations about the world. This is called machine learning: a computer observes some data, builds a model based on the data, and uses the model as both a hypothesis about the world and a piece of software that can solve problems (Russel & Norvig, 2022).
Modern machine learning, a subfield of machine learning that focuses on improving AI agents over time by learning, draws its ideas from the biology of the human brain, where learning occurs via a network of neurons that communicate through synapses. In machine learning, we talk about artificial neural networks. With the exponential growth in data availability and computing power, scientists have introduced the usage of multiple neural networks into layers, giving rise to the deep learning discipline. This progression marks a shift from biology-inspired neurons to a focus on algorithmic optimization and large-scale engineering, where “neurons” (self-attention heads, MLP channels) are freely redesigned to maximize parallelism and statistical efficiency.
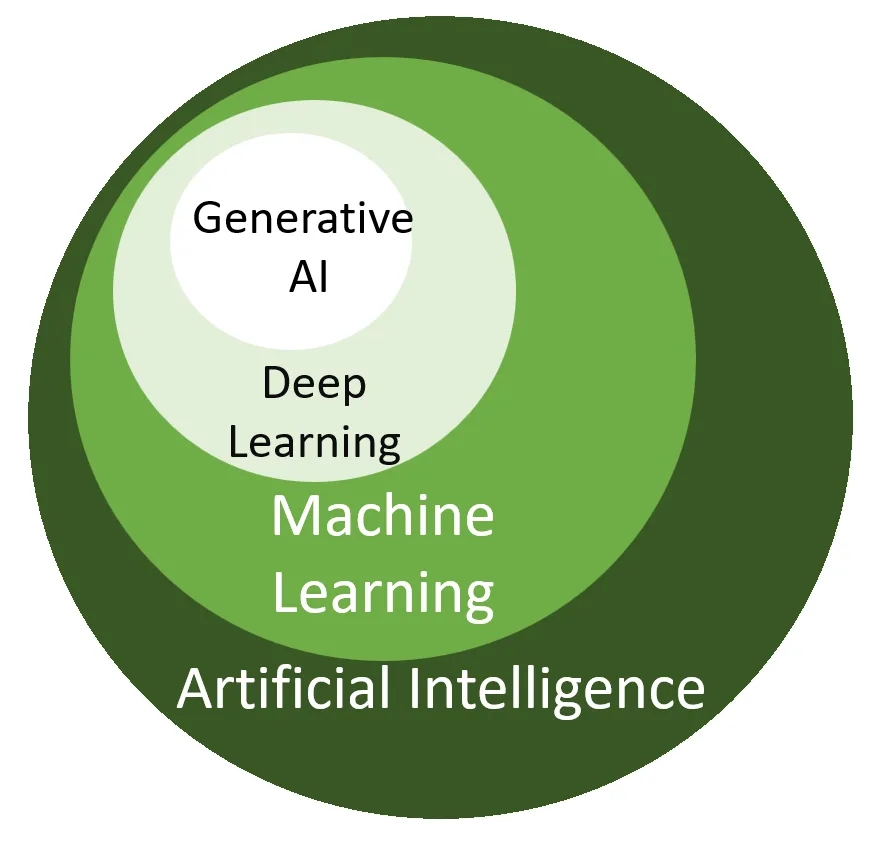
Fig. 1, Artificial Intelligence Fields
There are three main types of learning. Supervised learning, where an agent observes input data provided in the form of pairs of input and output (label) data and learns to map the input to an output via a mathematical function. In unsupervised learning, the agent learns patterns in the input data without explicit feedback. In reinforcement learning, the agent learns from rewards and punishments, called reinforcement. The agent’s goal is to gain more rewards and decides for itself which actions have led to the result and alters its actions in order to obtain more future rewards.
Generative AI and embedding spaces
Generative AI is a subfield of Deep Learning that focuses on creating new, unseen content based on input requests. Applications such as ChatGPT use Large Language Models or Large Multi-modal Models trained on unstructured data, including text, images, audio, and video. This unstructured data is converted into deep learning representations known as embeddings. An embedding is a vector, which is a multi-dimensional numerical representation that captures the essential features of the input data. These vectors are transformed through the complex architectures of deep neural networks. Mathematically, an embedding is a vector within a vector space. The proximity of these vectors in the embedding space indicates the similarity of their respective data points. For instance, in a language model, words with related meanings are represented by vectors that are close to each other in this high-dimensional space. The closeness of these vectors allows generative models to produce coherent and contextually relevant content by combining vectors that represent similar or related concepts.
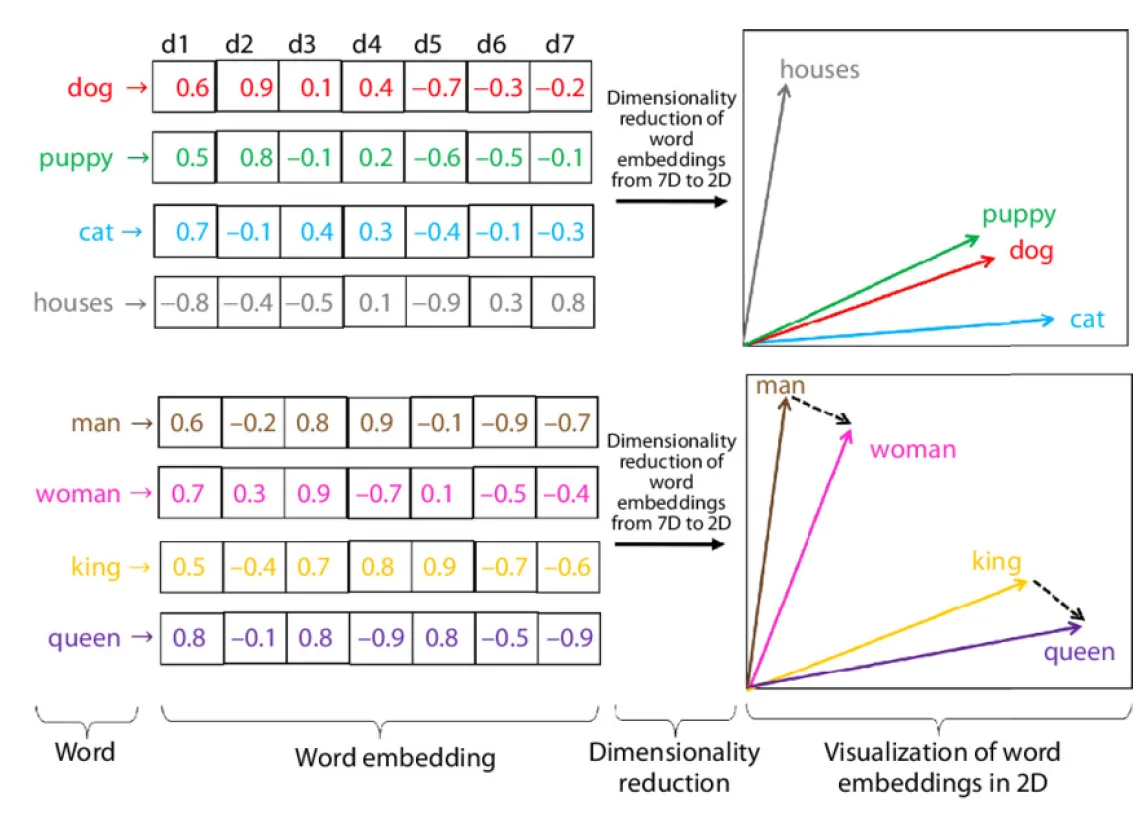
Fig. 2, Example of word embedding (Rosado, 2020)
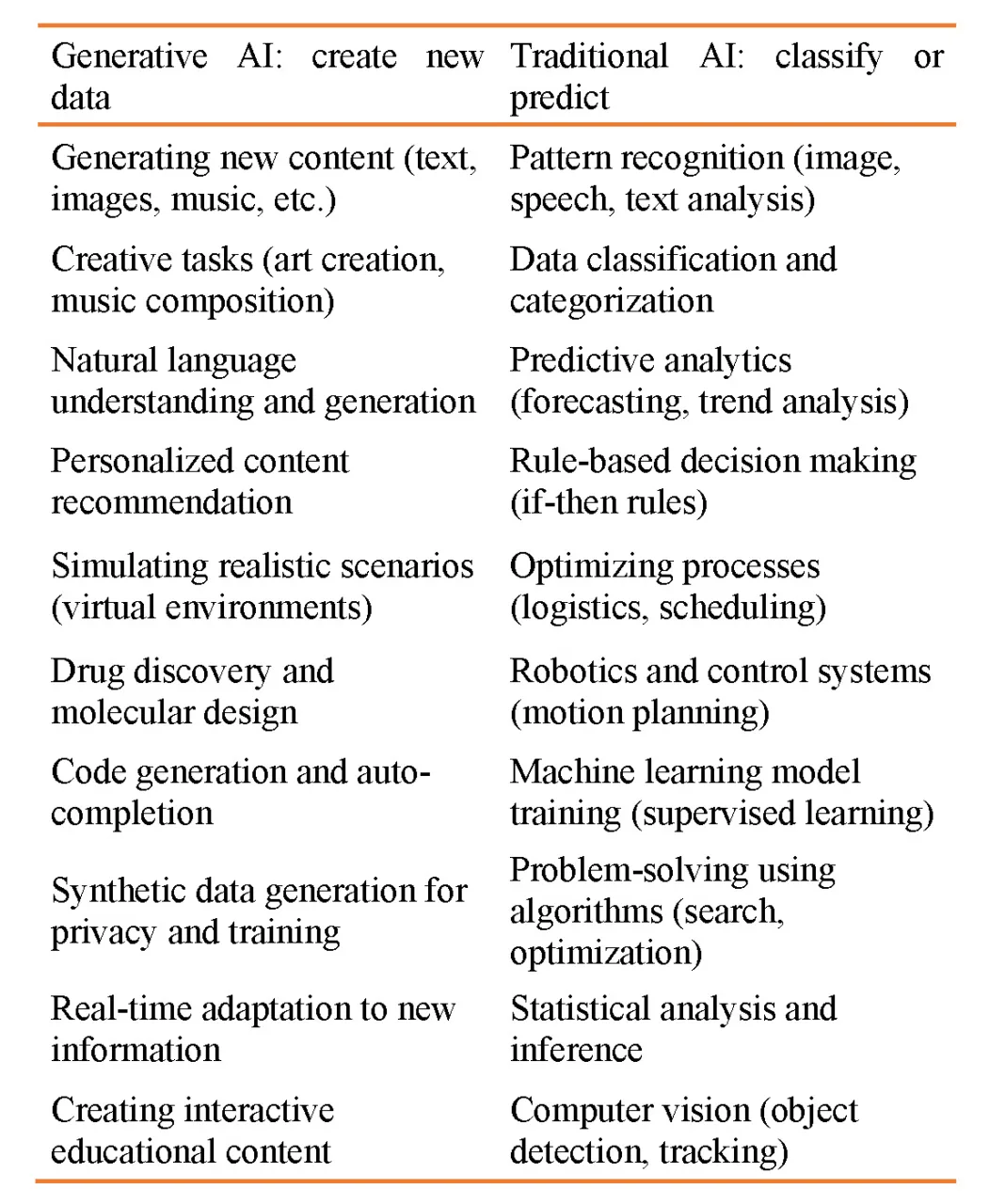
Table 1. A rough overview of Generative AI and Traditional AI utilization
Graph Neural Networks (GNNs)
Graphs are a way of representing a network of related elements. A graph is composed of nodes (or vertices) and edges.
The nodes represent the elements of the network, for example, people in social networks, or atoms in molecules in molecular design. The nodes have properties called features. The edges represent the relationships between nodes and can be directed or undirected.
Graphs are non-Euclidean spaces, which means that the distance between two nodes in a graph is not necessarily equal to the distance between their coordinates in a Euclidean space. This makes it difficult to represent them by embeddings with the same mechanism used for text (Figure 2) or pictures, for example, where a picture can be seen as a matrix of pixels. As such, traditional neural networks are difficult to apply to graphs.
Graph taxonomy and learning tasks
(Khemani, Patil, Kotecha, & Tanwar, 2024) have conducted a recent comprehensive study of GNNs. The structure of the graph, its type, and the learning task are the three main graph characteristics. The structure of a graph can be called structural when the structure is explicit (e.g., ship structural layout) or non-structural when the structure is implicit (e.g., a “word” graph for text). Graphs can be divided into 5 categories: directed and undirected, homogeneous and heterogeneous, knowledge graph, static and dynamic, transductive and inductive.
A directed graph is characterized by edges with a specific direction, indicating the flow from one node to another, while in an undirected graph, the edges lack a designated direction, allowing nodes to interact bidirectionally. The properties or structure of a dynamic graph change over time. Homogeneous graphs have only one type of node and one type of edge. Heterogeneous graphs, however, have different kinds of nodes and edges. An array of triples in the form of (h, r, t) or (s, r, o) can be represented as a Knowledge Graph (KG), which is a network of entity nodes and relationship edges, with each triple (h, r, t) representing a single entity node. The relationship between an entity’s head (h) and tail (t) is denoted by r. From this perspective, a Knowledge Graph can be considered a heterogeneous graph. A Knowledge Graph visually depicts several real-world objects and their relationships. In a transductive graph, the entire graph is provided as input, and the primary objective is to predict the labels for valid data. An inductive graph also uses the complete graph, but only a sample within a batch is considered, and the key focus is on making predictions for labels of the valid data. (Khemani, Patil, Kotecha, & Tanwar, 2024).Graph Neural Networks (GNNs) are a type of deep learning models that can be used to learn from graph data. GNNs capture the complex relationships between neighboring nodes by aggregating this information in a message passing mechanism.
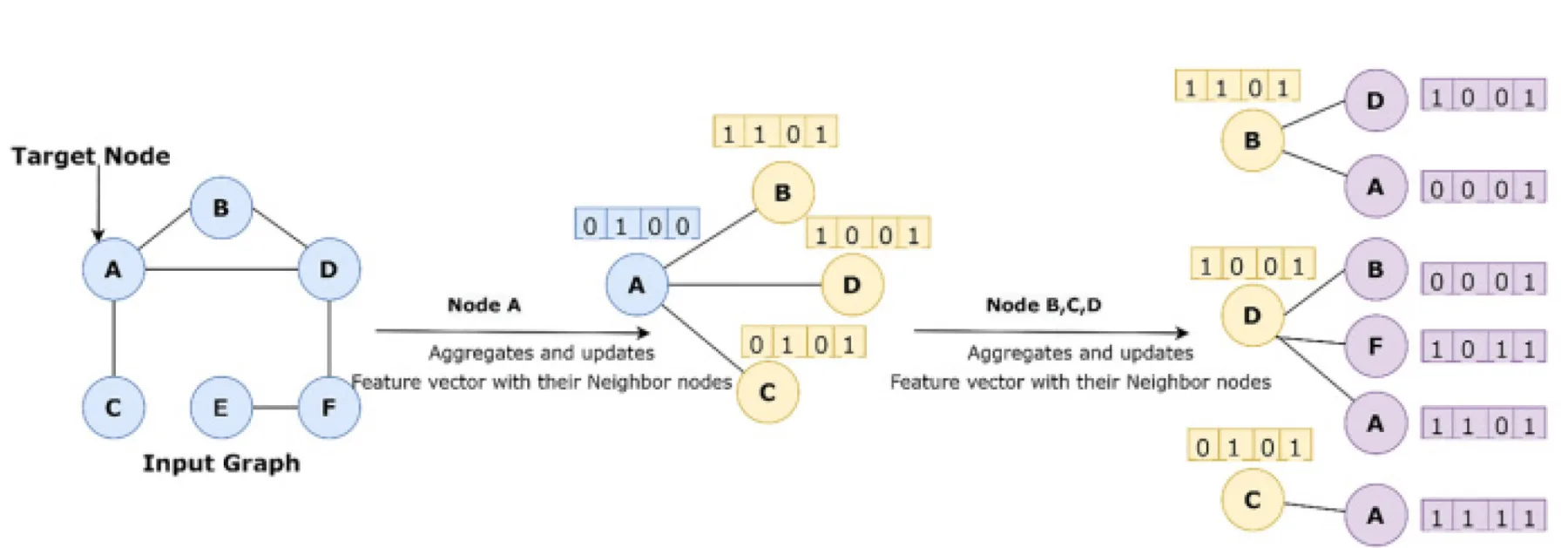
Fig. 3, Illustration of the message passing mechanism (Khemani, Patil, Kotecha, & Tanwar, 2024)
Any Graph Neural Network is composed of two main processes: in the first process, the node computation graph is determined, and in the second process, it is propagated and transformed over the computation graph. This computation graph defines the architecture of the underlying neural network. This allows the propagation of the information across the graph structure to compute node features, or node embeddings.
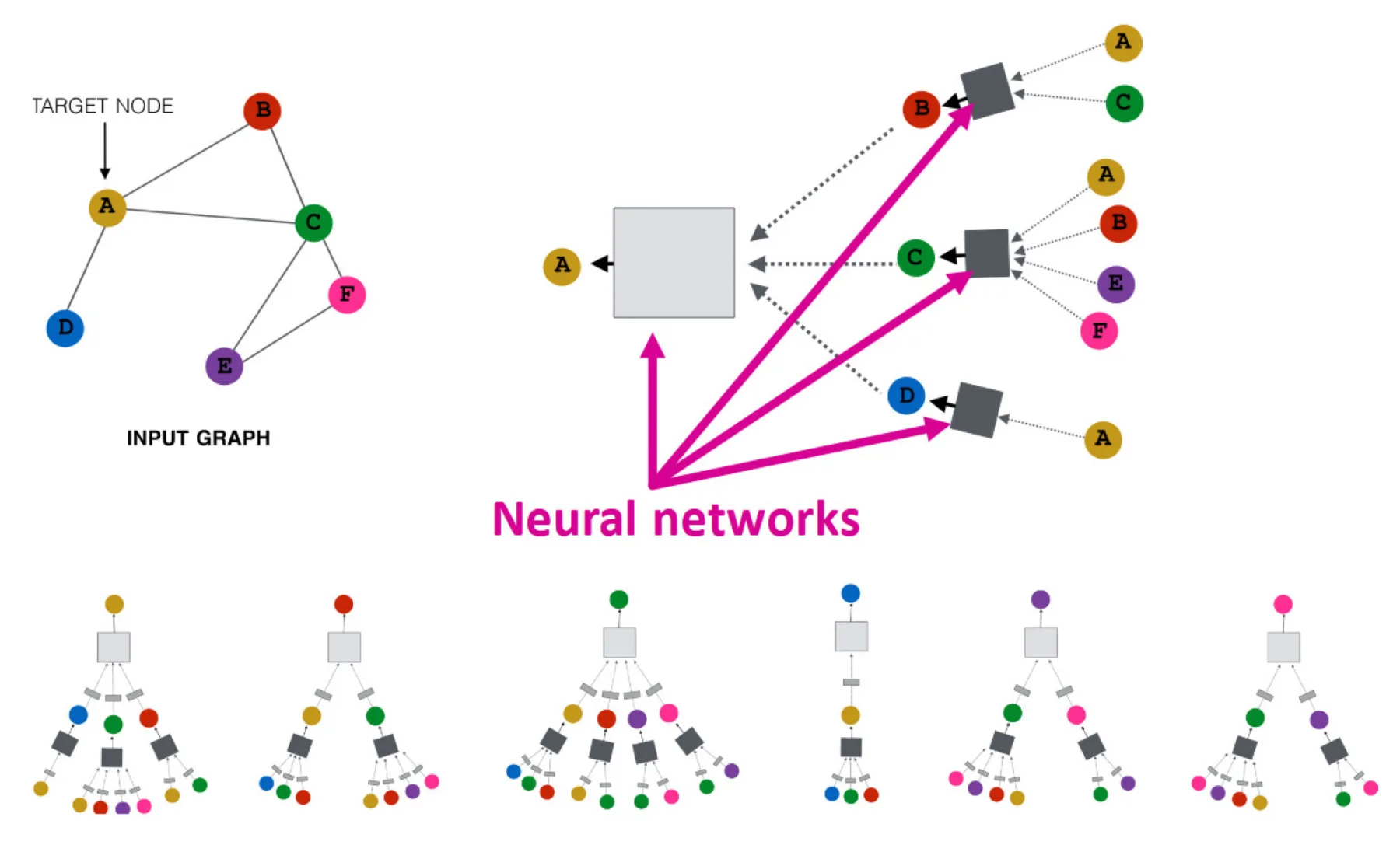
Fig. 4, Illustration of the graph computation principle (Leskovec, 2024)
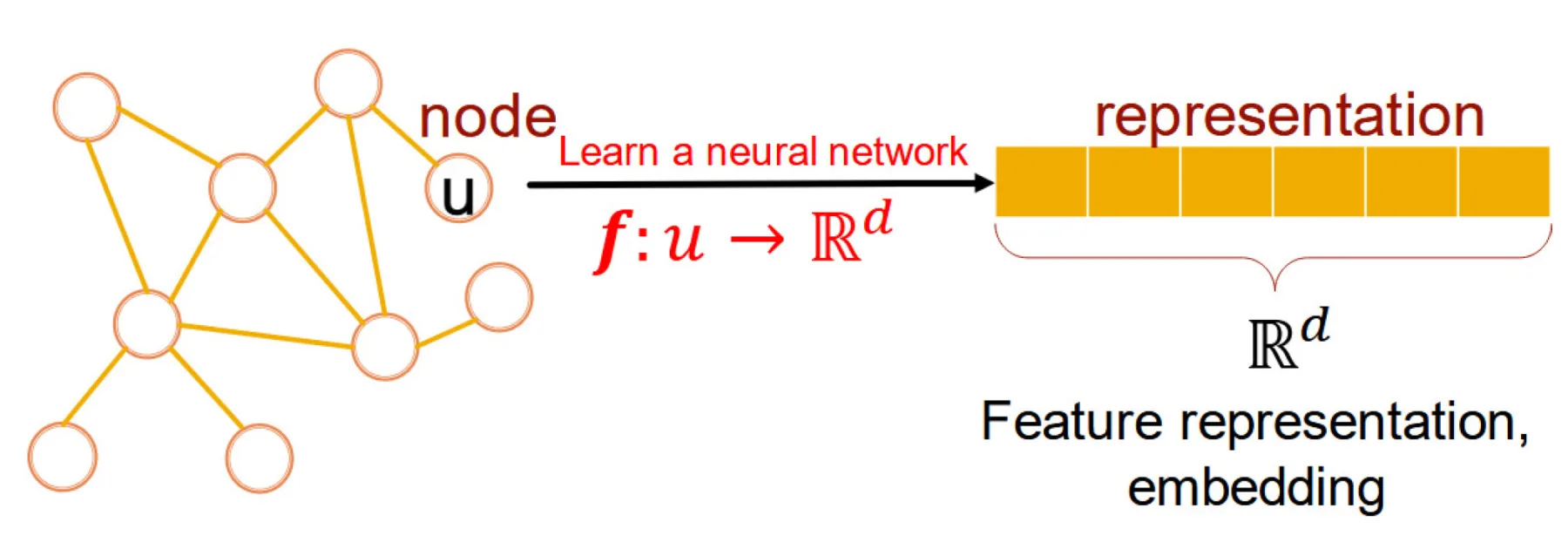
Fig. 5, Representation of feature embeddings in a graph (Leskovec, 2024)
GNN architectures and application domains
Various types of Graph Neural Networks (GNNs) exist. The optimal GNN architecture varies depending on the specific problem and can be determined by examining the type of graph that represents the data.
Due to their ability to operate in complex data networks, GNNs have gained popularity and have been successfully used in several domains. GNNs are used for recommender systems, traffic prediction, anomaly detection, and 3D scenes generation. Recently, they have been successfully applied to drug discovery and molecular design. In the maritime sector, Li et al., 2023) have conducted research on multi-port ship traffic prediction based on GNNs.
Deep graph generative models start with graphs given as input and learn the properties of those graphs such that they can generate more instances of those types of graphs. A simplified formal definition is illustrated in Figure 5.
History of Graph Generation:
Step 1: Properties of real-world graphs. A successful graph generative model should fit these properties
Step 2: Traditional graph generative models. Each comes with different assumptions on the graph formulation process
Step 3: Deep graph generative models. Learn the graph formation process from the data
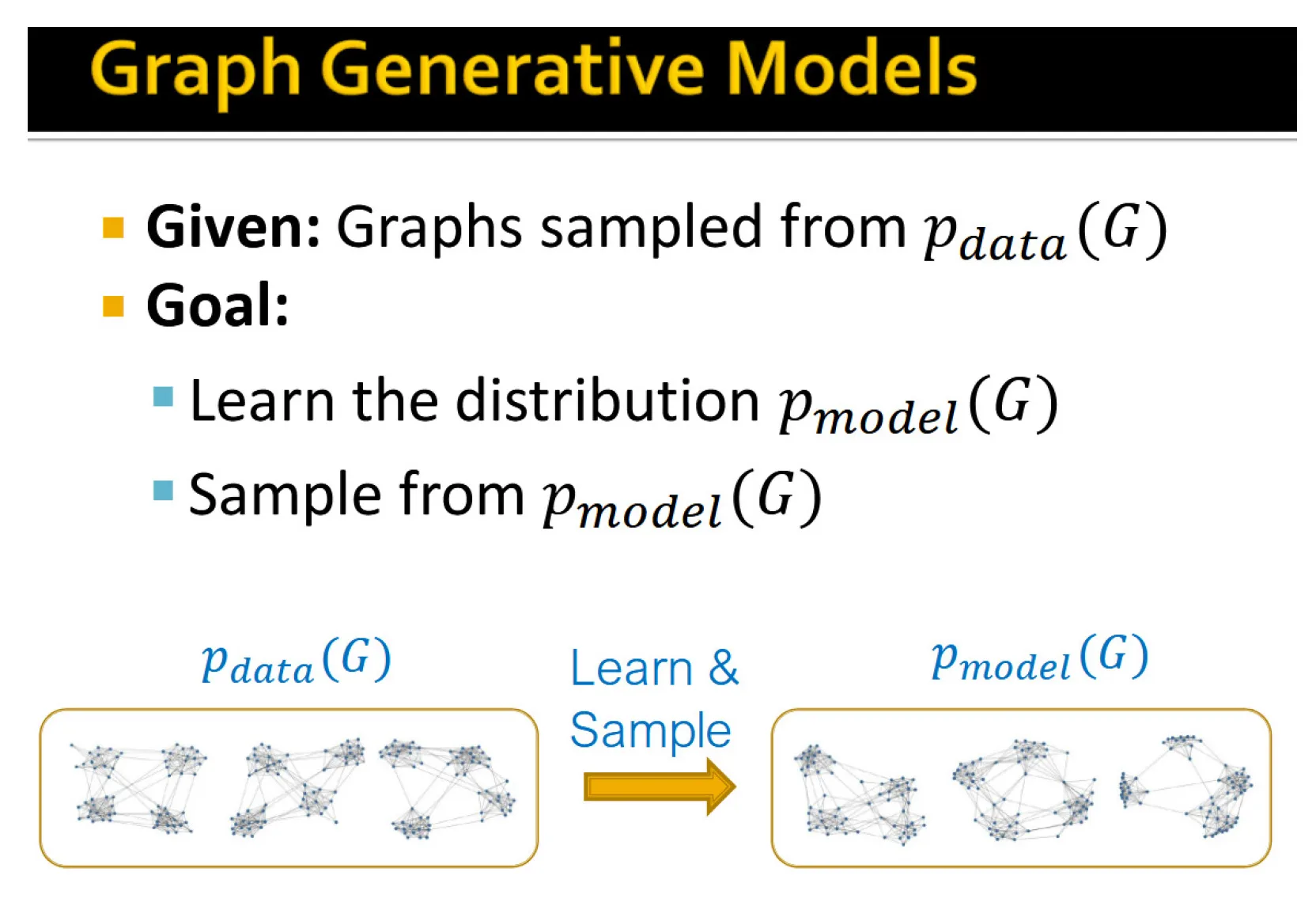
Fig. 6, Goal Definition of Graph Generative Models
Structural design
Structural ship design is a complex process that integrates multiple disciplines, thus qualifying it as a multidisciplinary optimization problem. It is crucial to ensure the vessel’s physical integrity and performance under various conditions, including load, fatigue, and damage scenarios. The structure must be lightweight to enhance fuel efficiency, while also being feasible to construct efficiently in a shipyard. Additionally, material and labor costs must remain within budget, and the design must comply with classification society Rules. Lifecycle and maintainability considerations are also essential factors to incorporate in the design process.
Humans have been constructing structures for a long time. Initially, traditional design was built on prior examples and modified primarily based on experience. This approach evolved into modern engineering design, which incorporates analysis based on mathematics and physics, builds rules for common designs (class rules, building code, etc.), and, more recently, simulation techniques that model various interacting processes and systems numerically. Our proposal aims to advance this field by introducing the concept of design driven by novelty, assisted by artificial intelligence.
Structural behaviour and element interactions
The behavior of ship structures is straightforward. Structures are composed of multiple parts, distinguishing them from single objects. A beam or plate is considered a structural element, but only a collection of these elements is referred to as a structure. The theory of structures builds upon the field of ‘mechanics of materials’ (also known as mechanics of solids or strength of materials) by examining the interactions and combined behaviors of collections of structural components. Consequently, our structural recommender system will focus on identifying patterns within these collections of elements to suggest optimal design structures.
Ships are an assembly of components following a known structural grammar. The structure can be divided into:
- Primary: Handle major global loads, such as the hull girder and side shell.
- Secondary: Large components acting as systems, like the double bottom and floors.
- Tertiary: Individual members, such as frames and plates.
For example, a midship section may be considered to consist of deck plating, side shell, bottom plating, inner bottom, longitudinals along the deck, side shell, and bottom, as well as transverses at every few frames. The zone-level breakdown could include the main deck panel (girder, longitudinal, and stiffened plating), double bottom (floors, bottom plate, inner bottom, and longitudinal), and bulkhead zone (vertical plate, horizontal stiffeners, and collars). A detailed structural component example could be a stiffened plate panel that comprises a plate (specifying thickness and material), stiffeners (defining spacing, size, and orientation), and brackets at the ends. Another simpler example is a girder, which is composed of a web plate (detailing height and thickness), flange, and cutouts for access or weight reduction.
Hull girder behaviour and global strength
The ship bends like a beam, and the hull can be considered a box-shaped girder. The deck and bottom shell form the flanges of the hull girder, and are far more important to longitudinal strength than the sides that form the web of the girder and carry the shear forces. (Bruce)
Advanced CAD ship design software utilizes the logical order of ship design structures and preserves the relationship between structural components, known as topology. An additional advanced feature utilized is interoperability, which refers to the ability to exchange data to assess the impact on other design phases. With these two essential capabilities in mind, our current methodology proposes an innovative approach to viewing ship structural data that leverages these capabilities to provide a next-generation ship structural data system: the AI-native ship structural system. By addressing the representation of data in a format that can be utilized across all design phases with AI capabilities, we present a blueprint for future-proof ship structural systems.
The concept of a novel ship structural design recommender
Conceptual model pipeline
Structural design is highly modular, and designers often reuse patterns. Our model aims to replicate that reasoning process using graph-based AI.
The goal of the proposed conceptual model is to recommend optimal groups of structural components (e.g., bulkheads, stiffeners, girders, etc.) and their spatial configurations in a ship’s hull, guided by naval architectural design rules, performance criteria (strength, stiffness, weight, stability), and generative exploration. To mirror real-world practice of designing modular structural zones, the method will focus on subgraph generation, generating motifs of connected components instead of independent node-by-node assembly.
Our conceptually optimized ship structural recommender system consists of three AI pillars:
- Graph Neural Networks (GNNs) are used to learn design logic and structural context, a context-aware design understanding, from past structural layouts
- Subgraph Generation to mimic the actual design work, to work with structures (or design groups), not individual elements. Subgraphs are design-friendly groupings, not arbitrary clusters, like, for example, a stiffened panel. The generated subgraphs could represent design units based on rule-based heuristics, such as proximity or connection type, and by learning grouping patterns from past designs. Subgraphs can be reused or modified as building blocks.
- Reinforcement Learning (RL) to explore and optimize full-structure layouts. The RL agent is a trial-and-error optimizer that refines solutions using real-world feedback metrics to, for example, minimize weight or improve manufacturability.
Ship design and engineering have long traditions with extensive rules at both the function and production levels. Shipyards have also developed a knowledge base of best practices. For subgraph generation, a hybrid approach can be used based on established graph grammar rules and learned generative methods from existing ship structures. Rules checks can be applied at two levels: the node-level for individual elements like stiffeners or plate panels, and the subgraph-level for groups of connected elements to evaluate criteria such as combined stiffness. The candidate subgraphs are then passed through the rule engine.
The training is composed of two stages:
- The pretraining stage (supervised stage) is completed first, where the model is trained on existing structural data to learn valid structural patterns (motif patterns)
- After pretraining, the Reinforcement Learning Stage starts, using performance feedback and rule compliance rewards to fine-tune the policy for optimal subgraph generation. The agent iterates motif construction, receives performance-based rewards, and updates its policy to favor higher-scoring subgraphs.
Reinforcement Agent
In general, an RL agent (Fig. 7) observes the environment, takes actions to interact with the environment, and receives positive or negative rewards.

Fig. 7, RL agent (Leskovec, 2024)
The environment for our conceptually optimized recommender system will consist of the encoded representation of a candidate zone subgraph (node features, edge connectivity, graph topology). The rules represent the constraints in the environment, with any rule violation resulting in a negative reward or loop termination. The agent will observe the environment and take actions in the form of adding, moving, or removing nodes or entire motifs in the subgraph (e.g., attach a new stiffener group, or adjust the size of a girder). The system computes the reward based on the performance metrics and rule compliance score (e.g., reward = –(weight) + α·strength_score – β·violation_penalty). The reward can be split into local (zone stress, weight, and weld length) and global (interface compliance penalties delivered from neighbor zones). The agent learns from this score and updates its policy via reinforcement learning algorithms
The optimization black box will be done by FEA with boundary loads from the global coarse model.
Using ABAQUS, only worst-case patches inside the zone can be validated, and a global check done only once blocks are assembled.
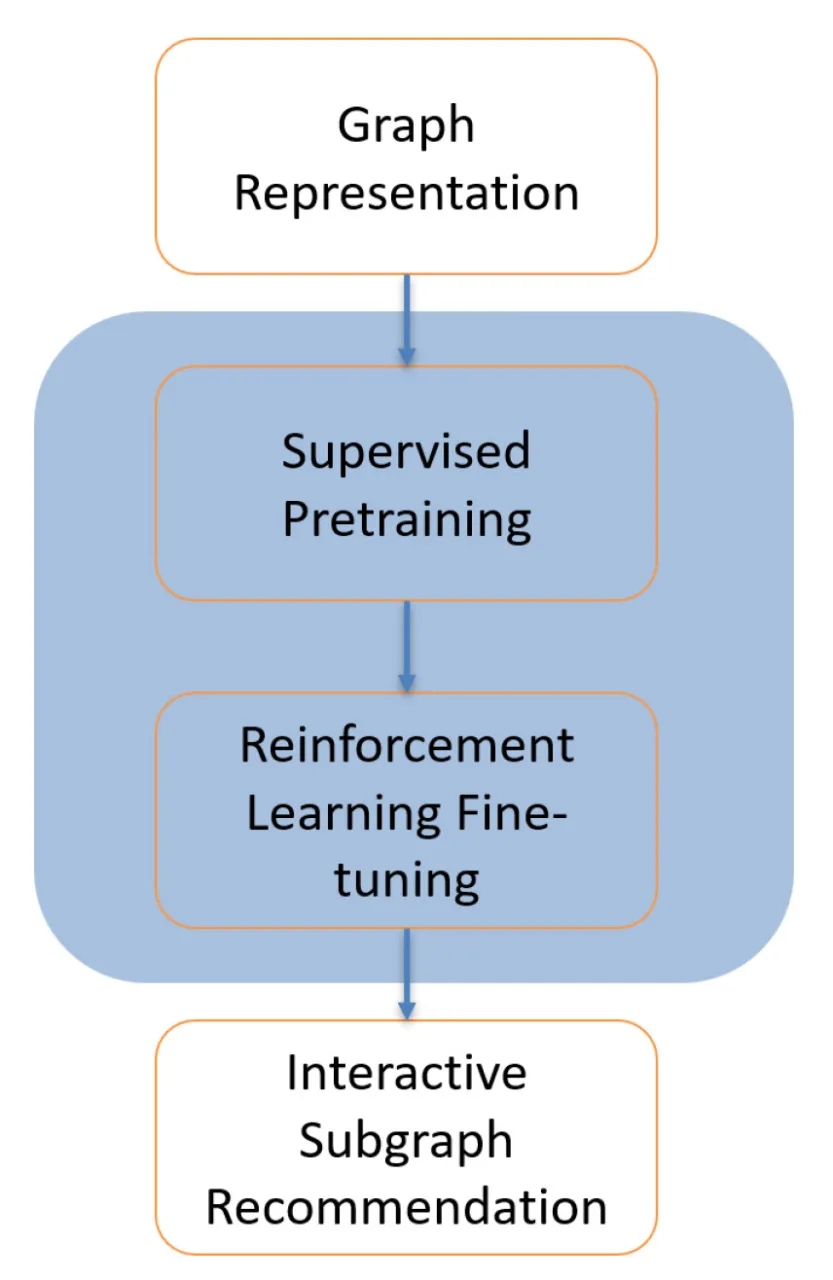
Fig. 8, Detailed workflow, the blue box represents the AI components
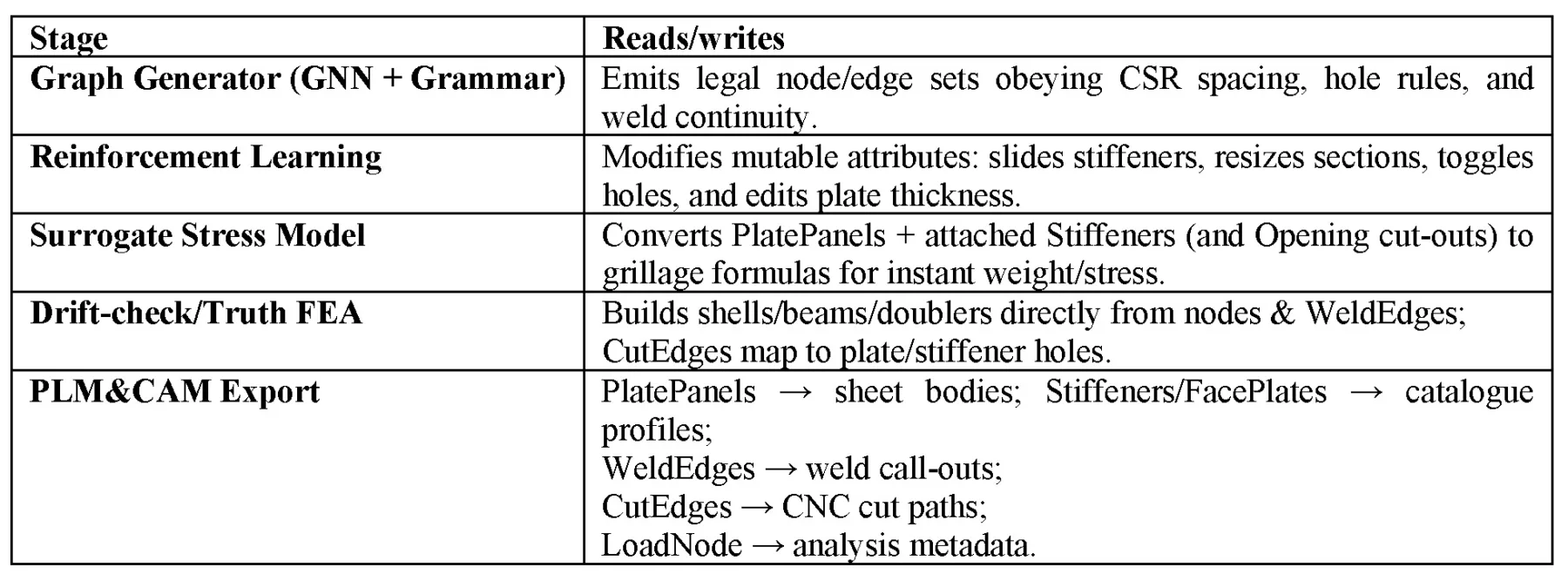
Table 2. Each part of the pipeline will use the defined graph data model:
Structural Graph Representation
Ship structural data is well-suited to a graph data model, where nodes represent structures or structural elements, and edges denote the relationships between them. The data structure of a structural graph illustrates how elements are interconnected and how attributes such as thickness impact the overall graph configuration.
The ship structural graph data will be a heterogeneous graph, featuring multiple types of nodes and edges. This approach encompasses the richly connected perspectives on the structural data, allowing examination of a structural element, or node, in terms of its location, function, or assembly.
Zone-based subgraph modelling
Given that designers construct zones/blocks (e.g., double bottom segments, side shell bays, bulkhead panels), our proposed method treats each zone as a sub-graph, reflecting block-construction practices in shipyard
Nodes represent structural design entities: plates, longitudinal stiffeners, and transverse stiffeners. Edges represent the various relationships between the nodes. The proposed conceptual model regards ship structural data as a network of interconnected components. Transforming it into a graph enables capturing the relationships that influence strength and behavior.
Data for training
OCX
The OCX standard is an open standard exchange format used for 3D data transfer between classification societies and various CAD applications. It was originally developed to replace the use of traditional 2D drawings with 3D models, thereby allowing the transfer of full basic design models. OCX includes detailed information such as 3D model topology, ship-specific taxonomy, and the spatial and logical structure of compartments and tanks (DNV, 2023).
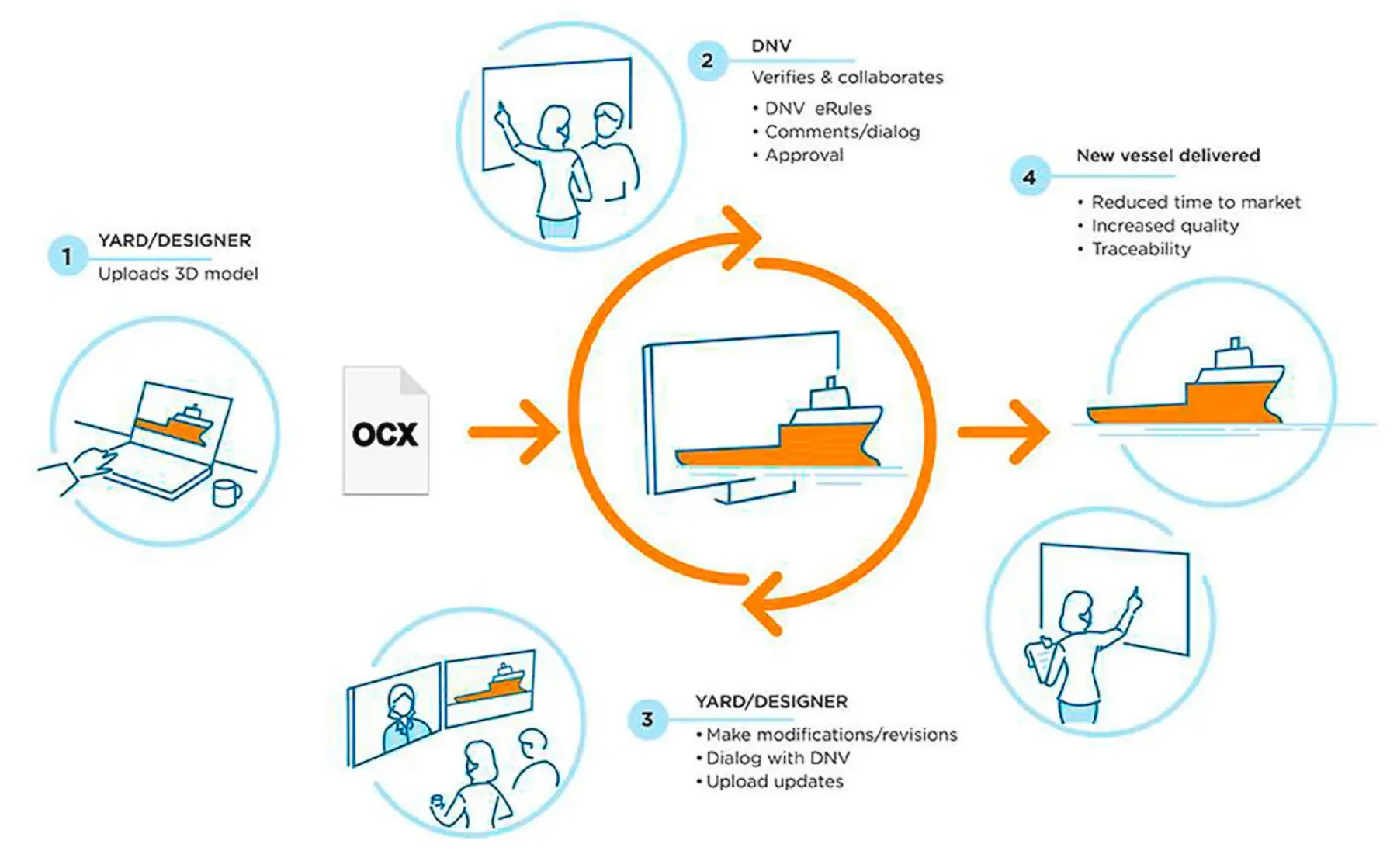
Fig. 9, Direct 3D digital classification process to improve the exchange of information between the different stakeholders and accelerate the classification process (DNV, 2023)
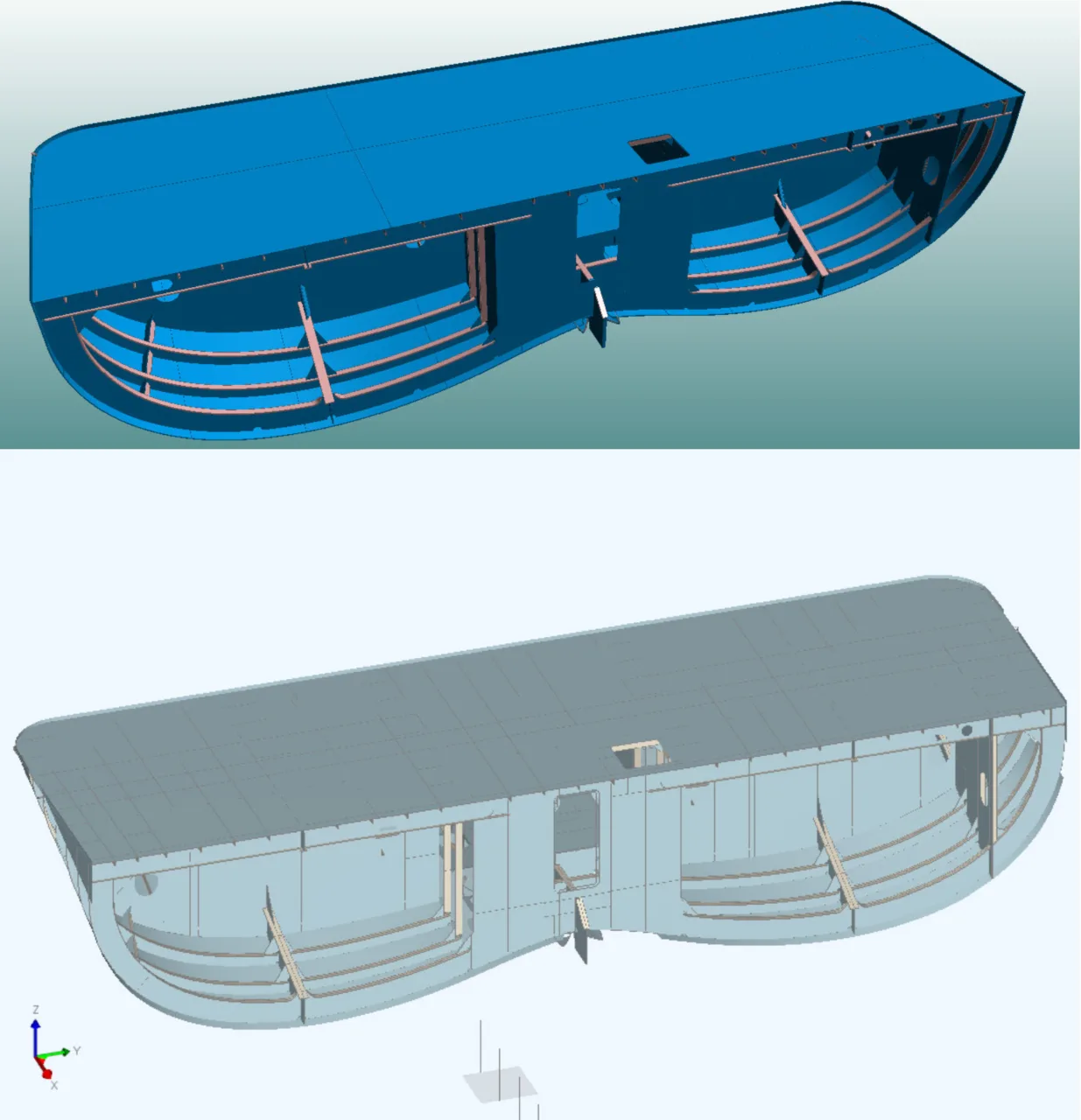
Fig. 10, An example of structure being transferred from a CAD system (Cadmatic Hull) to a class system (Nauticus Hull) using OCX
Training the conceptual model for learning patterns in ship structural design requires extensive design data examples. To address this need, we suggest adding a module that enables data transformation to the graph data model from various sources. Given OCX’s robust capabilities and widespread use, it is a suitable candidate for converting any 3D CAD model into an AI-compatible format. Through the extract, we must map the parts into nodes and edges, preserving the relationship and the spatial information. This will ensure compatibility with any CAD system that can export OCX models, allowing design data to be collected from multiple sources.
Elaboration of the Recommender
Unlike other engineering domains, the field of ship design has faced challenges in establishing a universally accepted neutral model. Ship CAD companies continue to rely on proprietary databases and database models, significantly hindering the adoption of modern techniques that could advance the industry.
A graph database is designed to emphasize the relationships between data entities. In contrast to relational databases that store data in fixed table structures, graph databases represent data as a network of entities with relationships, depicting entities as nodes and relationships as edges. This architecture makes graph databases particularly suitable for real-world scenarios, including the complex representation of ship design data and documentation. A study investigating the application of graph databases for ship data representation at the initial design stage was conducted as part of the SEUS project (Koelman, Veelo, Seppälä, & Filius, 2024).
Integrated GNN pipelines and tooling
Graph databases are valuable for an AI-native ship design solution not only due to their ability to represent the rich connectivity and multiple dimensions of ship design data but also because they offer integrated machine learning pipelines. For instance, ArangoDB’s ArangoGraphML module integrates GNN workflows into its multi-model engine. The projects will be managed through a Python package that handles featurization (graph transformation to tensors (high-dimensional vectors)), model training, selection, and inference. Supported tasks include node classification, link prediction, and embedding generation. Behind the scenes, ArangoGraphML orchestrates data extraction from collections, pipeline configuration, and interfaces with DGL or PyG for GNN training, subsequently writing results back to the graph collections.
Several graph database platforms eliminate the need for extensive ETL processes and manual feature engineering, providing genuine “out-of-the-box” GNN capabilities, thereby allowing focus on domain-specific issues.
Data Representation
The nodes would represent the structural elements together with their key attributes, e.g., plates with material, thickness, and outline; stiffeners with span, orientation, and continuity; brackets with shape and thickness; loads with types, magnitude, and direction.
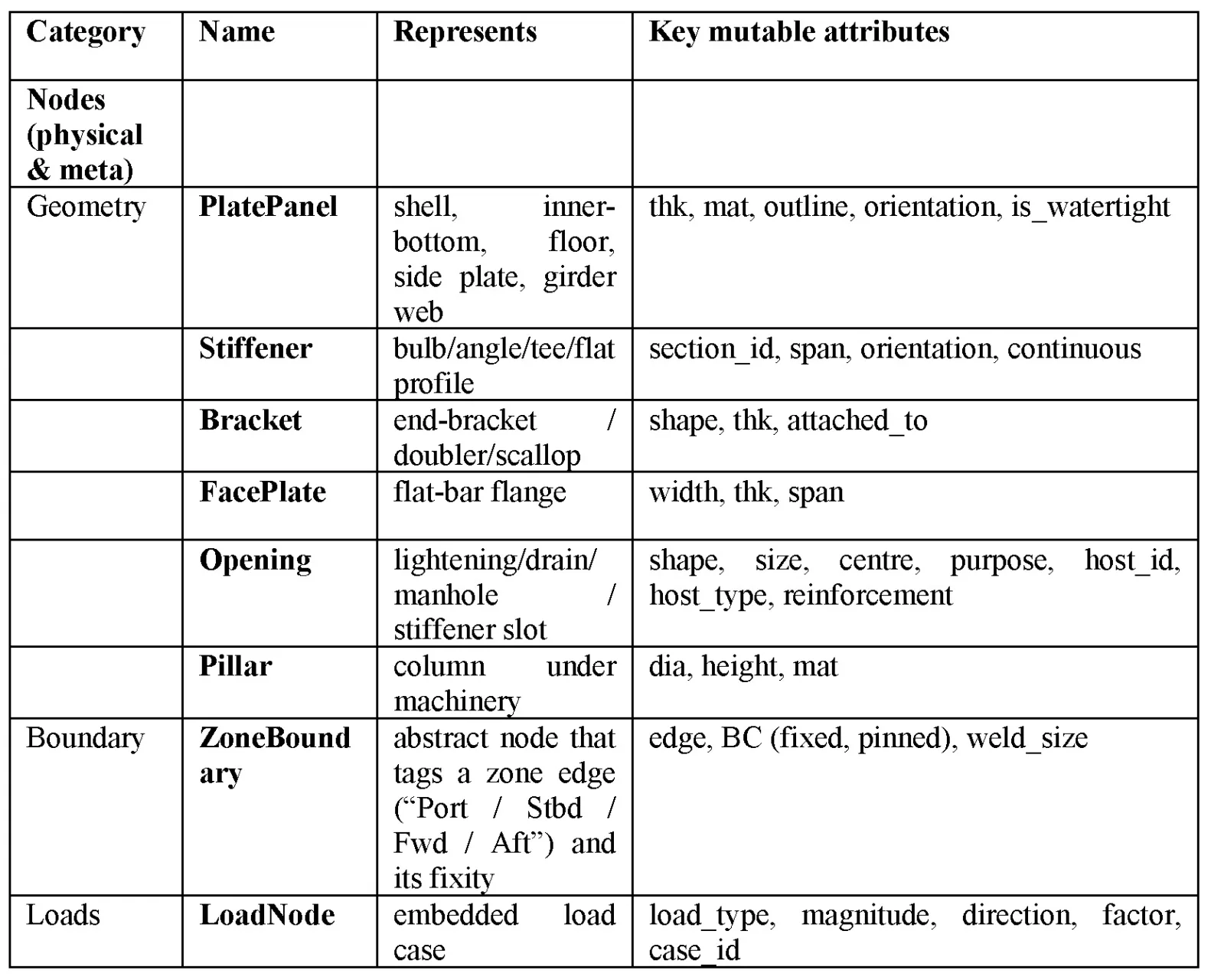
Table 3. Different node types, representation, and key attributes.
The edges represent the relationship between the nodes mentioned earlier, and they can represent physical connections like WeldEdge; CutEdge; load transfer path (e.g., loads transferred from the stiffeners to the side shell), functional grouping (as in assemblies, subassemblies), etc.
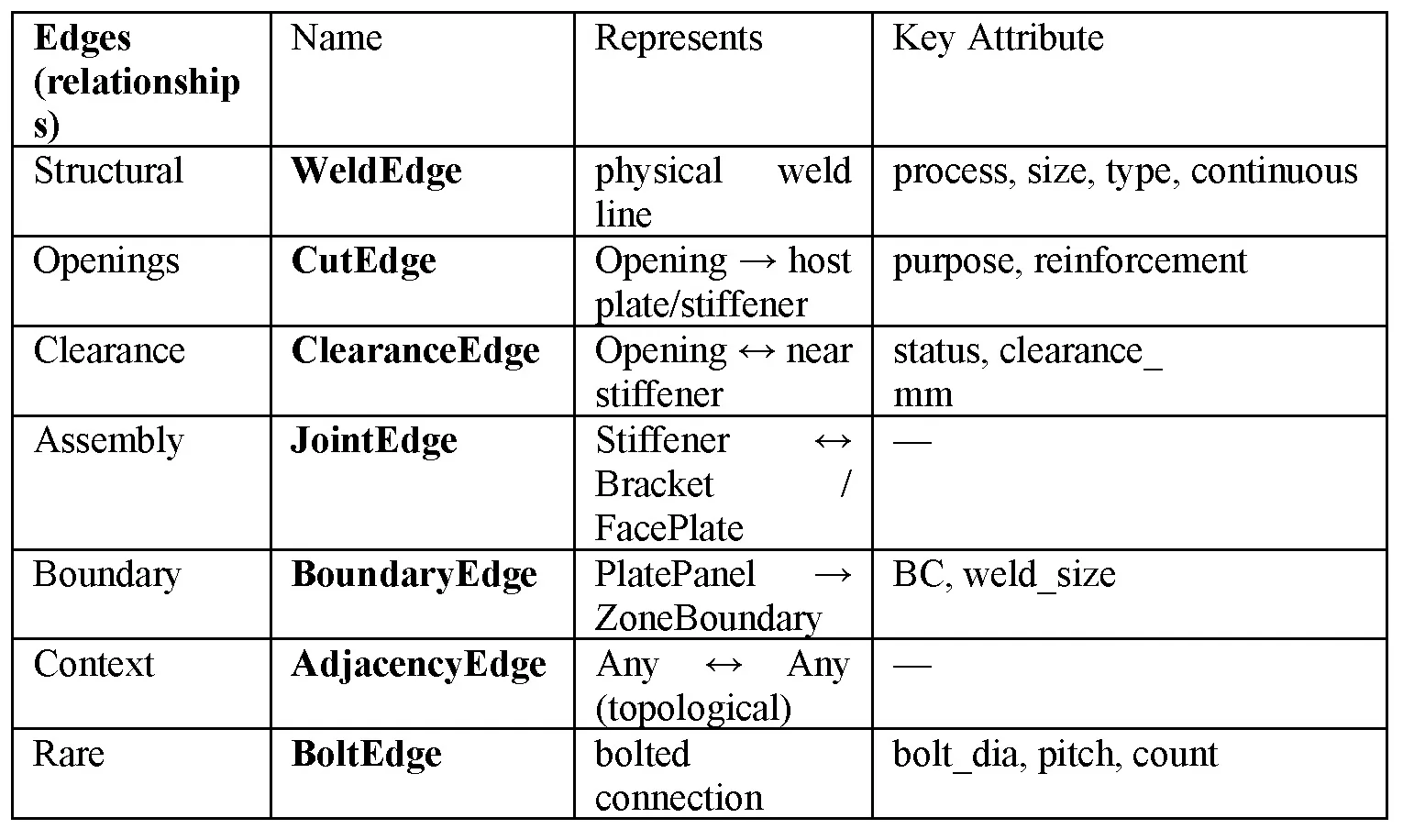
Table 4. Different edge types, names, representations, and key attributes.
One important step is to transform the data into meaningful representations so that GNN can process the graphical dataset effectively. In our structural data, each node can represent a structural element, a boundary, or a load, and is annotated with a name and a key mutable attribute. The edge representation is an illustration of a relationship, like weld for structural, CutEdge for opening, JoinEdge for assembly, BoundaryEdge for boundaries, etc.
Instead of learning individual parts, the GNN can learn and understand common structural patterns such as stiffened plates (plates, stiffeners, and brackets) and double bottom structures (floors, longitudinals, and shell).
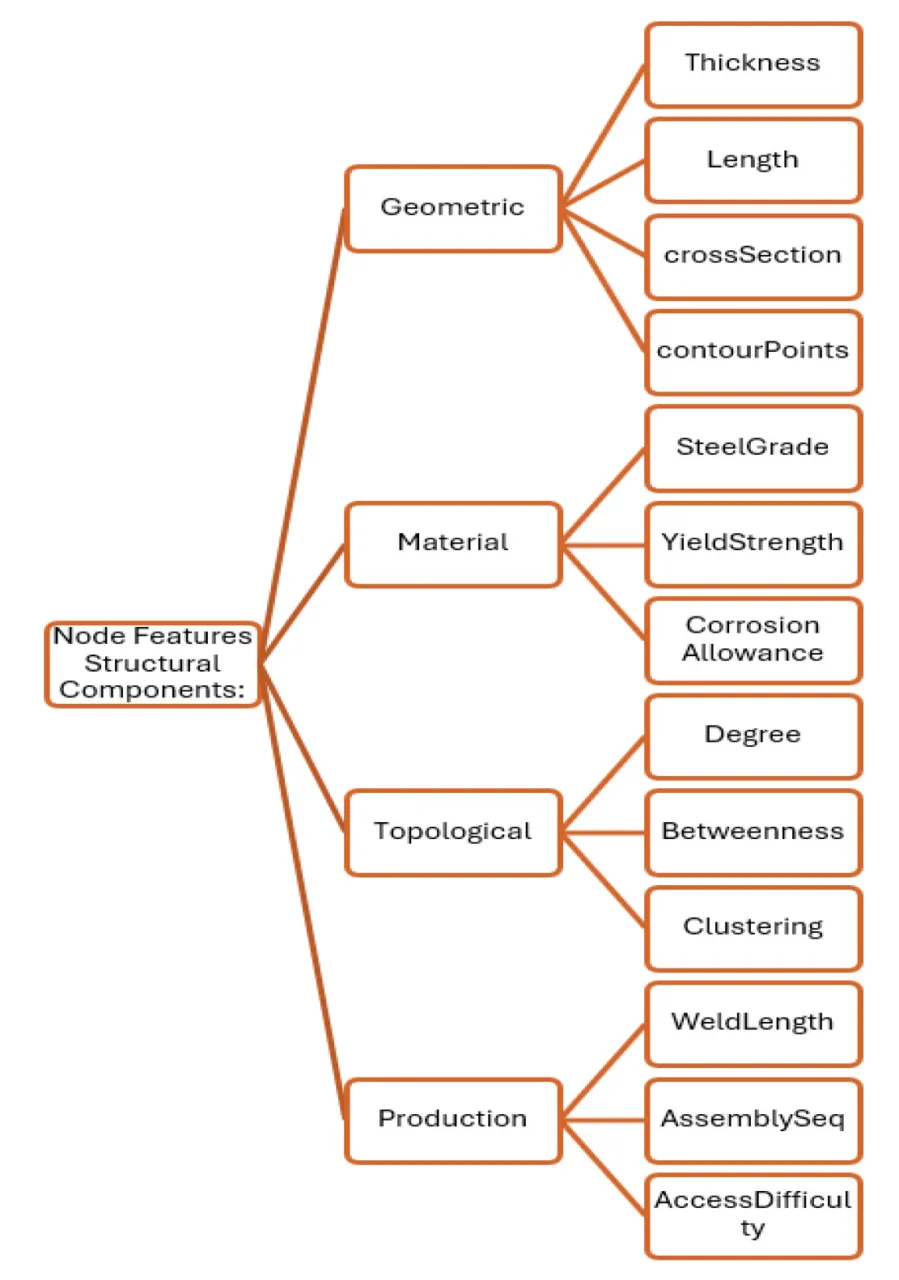
Fig. 11, Node feature hierarchy for ship structural data inspired by feature engineering approaches in (Zhou, et al., 2020) Zhou et al. (2020) and DNV GL classification rules (2023).
Examples
Stiffened Panel
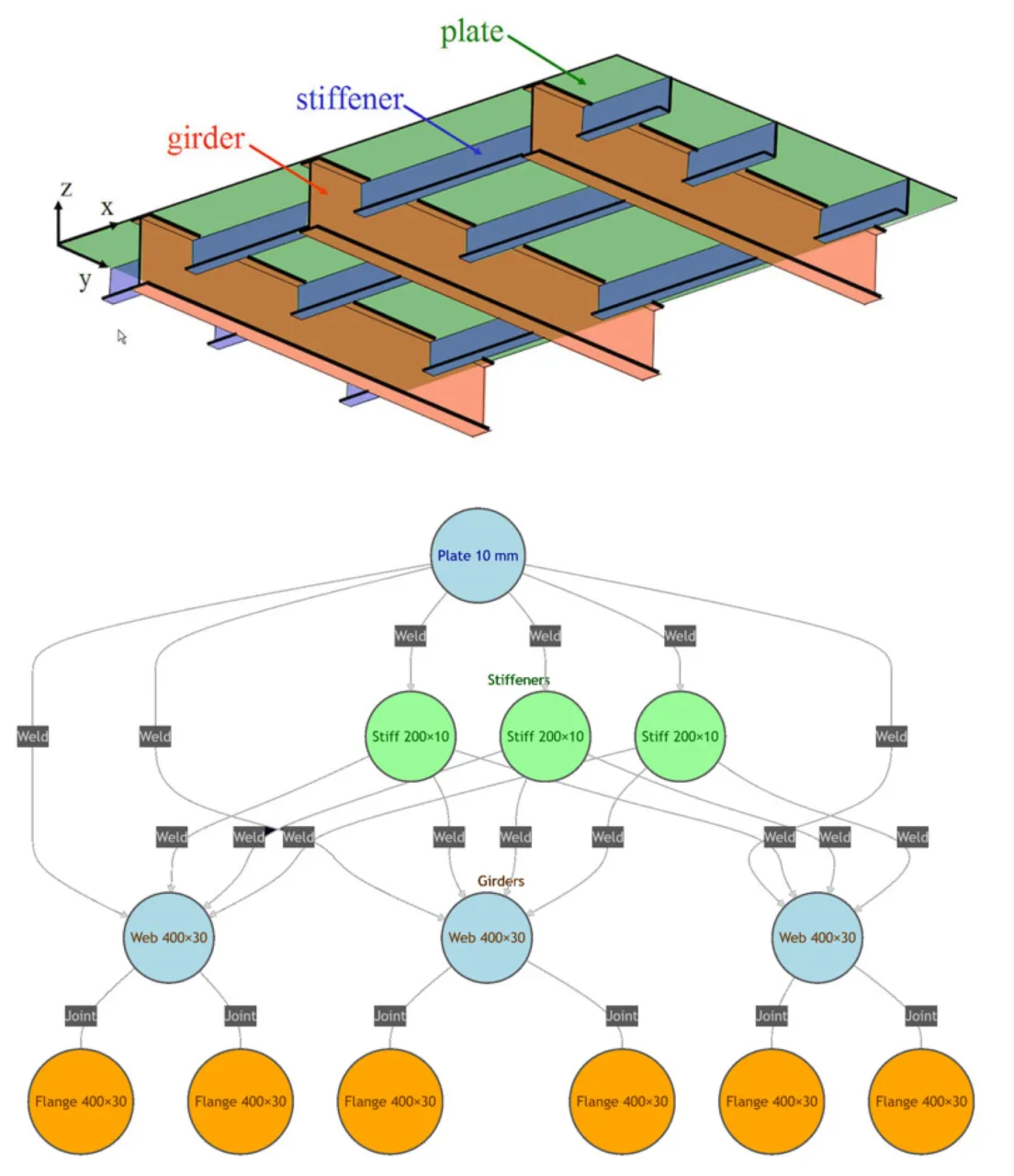
Fig. 12, A simple example of a stiffened plate and the corresponding graph representation of the stiffened plate.
Double Bottom Pane
The double bottom structure of a vessel, which is widely used in modern shipbuilding, is a classic example of a structural pattern that can be used in GNN models for recommendation.
In the double bottom graphical representation, the nodes are represented by the bottom plate, floor, and longitudinals which are all part of the double bottom assembly. The edges are presented by connections, as welding.
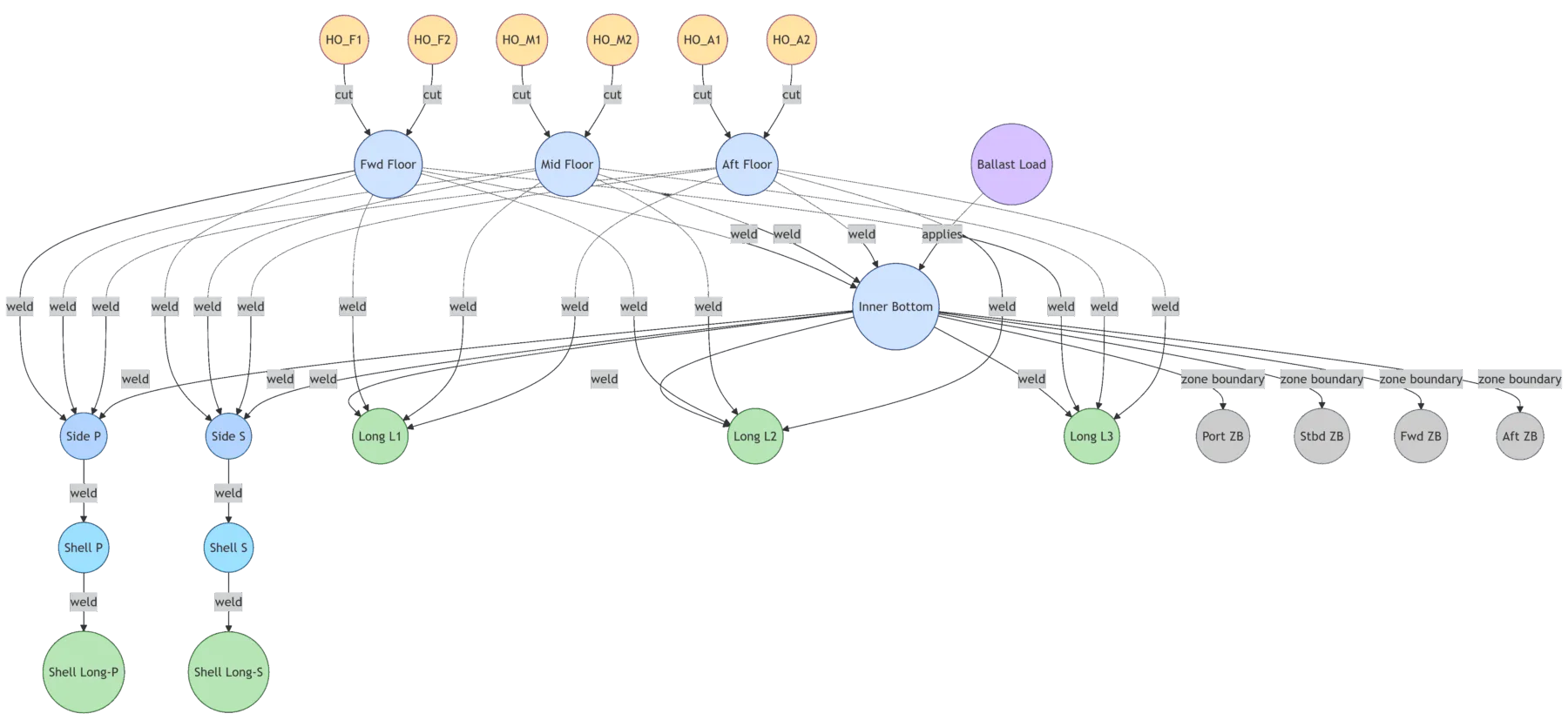
Fig. 13, A graph representation of a double bottom panel
Future
Small-scale experiments
Implementing the whole experiment requires great resources, in all three major areas: 1) gathering and creating training data, 2) choosing the right architecture for each step and adjusting the parameters, especially at the reinforcement learning level, and 3) computing power, in the form of a supercomputer with state-of-the-art GPUs. A bigger consortium of partners, including representatives from shipyards, software providers, and universities, could bring the whole concept to life.
Creating a minimum viable product is feasible with reasonable resources. We can test this by designing smaller experiments to 1) validate the learnable diversity in a yard catalogue, 2) prove local optimization can save steel without altering interfaces, 3) demonstrate multi-zone coupling stability, and 4) confirm end-to-end PLM robustness before releasing to production.
The proposed experiments are ship-yard grounded, taking into account (i) IACS Common Structural Rules, (ii) typical ship-yard block-assembly practice, and (iii) commercial CAD/PLM workflows to ensure engineering realism.
Experiment A
Pattern Learning & Layout Invention CNN + Graph
Grammar
Methodology: IACS CSR snippets become grammar rules—e.g. • “Longitudinal spacing ≤ 760 mm” • “Lightening holes can’t slice into the web flange.” The grammar rejects any candidate the moment it violates a rule, so the GNN only explores legal topologies. The GNN looks at hundreds of real double-bottom tiles and learns the patterns: beams run straight, holes leap away from edges, etc.
Motivation: Creating a grammar to help the AI generator ensures the newly generated panels follow structural design logic and are not illogical.
Experiment B
Weight Trimming with RL Reinforcement Learning (PPO)
Methodology: Yard block practice guides the action possibilities: starting from one of the GNN layouts, move stiffeners in 25 mm snaps (plate-line tolerance), change their sizes, or change to catalogue HP bars only, always asking with every move: “Has the weight been reduced? Is the strength guaranteed?” The weight and strength can be calculated rapidly with a surrogate in order to determine the RL score. Every ~200 moves (or seconds), we choose a small number of designs and run a more exact simulation (FEA). If any slow result differs from the surrogate by more than a small margin, it means the surrogate has drifted. To fix the drift, we add the new exact results back into the surrogate’s training set and retrain it.
Motivation: Keeps the search realistic and ensures weight savings directly translate into standard steel orders.
Experiment C
Neighbour-to-Neighbour Check Medium-size FEA every few RL rounds
Methodology: Block-assembly seams are modelled exactly as in production: continuous welds on the long edge, staggered fillet on the short. The global check is done every 10 drift cycles (or minutes) and makes sure two slimmed panels still share the load the way a block E-plan expects it to.
Motivation: This prevents the occurrence of imbalanced load distribution that can arise when two blocks are joined in the dry-dock.
Experiment D
PLM Survivability Gate CAD/PLM import + welding-robot reach test
Methodology: All files are exported to a CAD/PLM system that contains a wizard that applies yard shop rules (min weld-gun clearance 70 mm, plate bend radius ≥ 4 t) and flags anything outside spec. Success is when a human planner must fix any red flags in under 10 minutes each.
Motivation: Demonstrates that the AI output can be used straight in nesting, robotic welding, and ERP, so production planners don’t inherit issues.
In summary, the experiments are designed to evaluate the foundations of a design. The correct layouts are generated using Grammar rules inspired by IACS. The Reinforcement Learning agent explores actions that ensure the yard can be built effectively. Lightweight FEA checks verify integrity while staying within central processing unit (CPU) limitations. The final PLM gate confirms each panel is ready for production.
Fig. 14, Minimalistic double bottom representation with three transverse floor webs, three longitudinal stiffeners, and six lightning holes (two in each floor web) to be used in the experiments.
Towards a holistic ship design graph
Apart from the application as conceived in this paper, the graph data structure may be beneficial for other ship design data as well. The (discussed) preliminary experiment within the SEUS project will be elaborated to include the basic internal subdivision topology and geometry, which includes bulkheads, decks, and the spaces/compartments that emerge between these planes. An existing naval architectural CAD program already supports this by utilizing a BSP (Binary Space Partitioning) tree to act as the glue between the planes and the spaces, as depicted in Figure 3 of (de Koningh, Koelman, & Hopman, 2011). Extending the data structure of that Figure with a grouping of multiple (convex) spaces into real compartments delivers a graph data structure that covers the entire internal space of the ship. Merging that with the graph as proposed in this paper will result in a unified data structure.
Conclusion
The proposed optimized structural recommender system mirrors practical ship design workflows by generating subgraphs rather than isolated nodes, accelerating the development of robust, optimal, and compliant structural layouts. The system performs a generative exploration guided by well-established rules and practices and optimizes the results through performance checks, using methods such as weight calculation, scantlings checks, and FEA analysis. By treating the hull as a composition of AI-optimized subgraphs, the research pipeline is transposed onto the exact granularity naval architects utilize. This approach reduces computational load, aligns with block manufacturing processes, facilitates incremental adoption (yards can pilot on one troublesome zone class while the rest of the ship stays conventional), and ensures that key risks remain explicitly testable within controlled experiments. In conclusion, the theoretical model has the potential to bridge the gap between design cycles by creating an extended AI data model and reducing potential costly production costs by integrating shop-floor and digital work instructions in the AI pipeline.
References
Bruce, G. J. (n.d.). Ship Construction, 7th edition.
Chiang, W.-L., Liu, X., Si, S. L., Bengio, S., & & Hsieh, C.-J. (2019). Cluster-GCN: An Efficient Algorithm for Training Deep and Large Graph Convolutional Networks. 25th ACM SIGKDD Conference on Knowledge Discovery and Data Mining (KDD ’19).
de Koningh, D., Koelman, H., & Hopman, H. (2011). A Novel Ship Subdivision Method and its Application in Constraint Management of Ship Layout Design. Journal of Ship Production and Design, 137-145.
DNV. (2023). Paving the way for 3D model-based class approval: Streamlining and accelerating the use of 3D models in the approval process. DNV.
Florean, M., Alonso de los Rios, V., Pietro, J., & Seppälä, L. (2022). Standalone intelligent general arrangement tool for holistic basic design. Proceedings of the 21st International Conference on Computer Applications and Information Technology in the Maritime Industries .
Khemani, B., Patil, S., Kotecha, K., & Tanwar, S. (n.d.) (2024). A review of graph neural networks: Concepts, architectures, techniques, challenges, datasets, applications, and future directions. Journal of Big Data, 11, Article 18.
Koelman, H. J., Veelo, B. N., Seppälä, L., & Filius, P. (2024). Closing the gap between early and detailed ship design models. 15th International Marine Design Conference (IMDC-2024). Amsterdam, the Netherlands.
Leskovec, J., Stanford CS224W: Ma chine Learning with Graph, http://cs224w.stanford.edu , 2024
Li, Y., Li, Z., Mei, Q., Wang, P., Hu, W., Wang, Z., . . . Chen, Y. (2023). Research on Multi-Port Ship Traffic Prediction Method Based on Spatiotemporal Graph Neural Networks. Journal of Marine Science and Engineering.
Rozado, D., Wide range screening of algorithmic bias in word embedding models using large sentiment lexicons reveals underreportedbias types, PLOS ONE, 15(4), e0231189, 2020
Russel, S., & Norvig, P. (n.d.) (2022). Artificial Intelligence, a Modern Approach, 4th Edition.
Zhang, B., Feng, G., Du, Y., He, D., & Wang, L. (2023). Complete Expressiveness Hierarchy for Subgraph GNNs via Subgraph Weisfeiler-Lehman Tests.
Zhou, J. C. (2020). Graph neural networks: A review of methods and applications. AI Open, 57–81.


